Změna neadaptivní geometrie na adaptivní – návrh držáku
V dnešní ukázce máme implementován typický příklad použití adaptivního modelování v praxi. Pro začínající podstatou adaptivního modelování je kompenzace chybějících parametrů a vazeb náčrtů …
V dnešní ukázce máme implementován typický příklad použití adaptivního modelování v praxi. Pro začínající podstatou adaptivního modelování je kompenzace chybějících parametrů a vazeb náčrtů pomocí vzájemných vazeb s okolními součástmi. Vytvořená geometrie je plně geometricky určena, ale je řízena pomocí vzájemných vazeb.
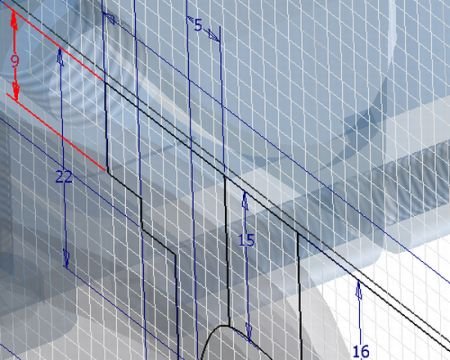
Červená kóta definuje rozměr, je ji nutné odstranit
Pro příklad jsme zvolili model, vytvořený jako studentský projekt na střední škole. Jeho konstrukce je realizována pomocí klasické parametrizace tak, že všechny součásti jsou vytvořeny samostatně a poté pomocí 3D vazeb umístěny do sestavy.
Po odstranění kóty inicializujeme adaptivitu
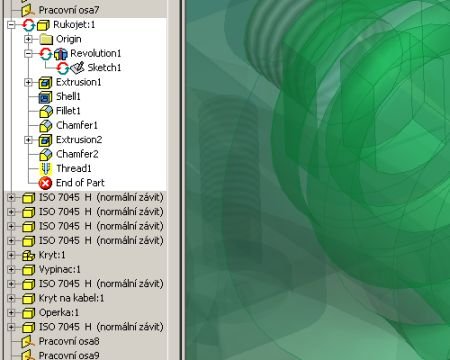
Změnu neadaptivní součásti na adaptivní provedeme pomocí jednoduché modifikace na nejnižší úrovni v objektovém stromu součásti, to znamená, musíme inicializovat náčrt na úrovni rotační součásti a odstranit z něj příslušnou kótu, která fixuje průměr držáku v otvoru. Pak již musíme provést pouze inicializaci aktivity na úrovni vlastní rotace náčrtu (pomocí pravého tlačítka myši). Tím umožníme „adaptivní deformaci“ pomocí 3D vazeb.

Vazby jsou určeny osou a tečností (adaptivní deformace)
Výsledný efekt na sestavu má adaptivita v tomto konkrétním případě ve vzájemné vazbě otvoru v těle brusky a odpovídajícímu průměru pro uchycení držáku (závit). Adaptivně se přirozeně upravuje jmenovitý rozměr závitu, ostatní prvky jsou vykresleny pomocí textury. Pokud chcete zvolit menší stoupání závitu držáku, musíte jej ručně modifikovat.
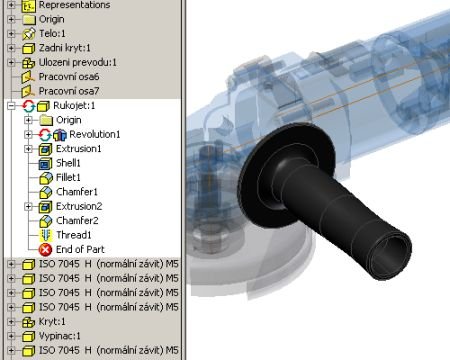
Modifikovaný, adaptivní držák