Využití globálních rovin pro fixaci rotace součástí
Při modelování sestav narazíme poměrně často na problém, jak vytvořit 3D vazbu rotační součásti, která eliminuje poslední stupeň volnosti – rotaci součásti. V dnešním tipu se na řešení tohoto problému…
Při modelování sestav narazíme poměrně často na problém, jak vytvořit 3D vazbu rotační součásti, která eliminuje poslední stupeň volnosti – rotaci součásti. V dnešním tipu se na řešení tohoto problému podíváme blíž.
S tímto problémem se setkáme vždy, když není na rotační součásti žádná geometrie, která by sloužila jako „záchytný“ prvek pro vytvoření 3D vazby. Tento problém je typický například pro různé typy šroubů, čepů, případně obecně vytvořených rotačních součástí. Fixace rotace je pak především otázkou interních předpisů o realizaci zakázky, které ponechají tuto vazbu jako volnou nebo předepíší postup její fixace.
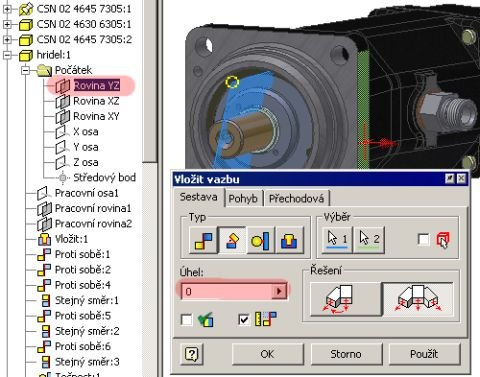
Fixace rotace součásti pomocí referenční roviny a úhlové vazby
Otázku jak vytvořit vazbu rotační součásti je možné řešit několika způsoby. Univerzální postup, který je použitelný prakticky u většiny 3D aplikací je postaven na vytvoření samostatné pracovní roviny, která je svázána se součástí na její úrovni. Tuto pracovní rovinu pak použijeme pro definici úhlové vazby vůči libovolné pracovní rovině, nebo vůči rovinnému prvku na součásti.