Simulujeme odraz kuličky v inventoru
3D model Pro simulaci celého pohybu vytvoříme dva objekty – kuličku a podložku, na kterou kulička dopadne. Podložku v tomto případě použijeme pouze jako vizuální pomůcku, aby bylo místo dopadu a …
3D model
Pro simulaci celého pohybu vytvoříme dva objekty – kuličku a podložku, na kterou kulička dopadne. Podložku v tomto případě použijeme pouze jako vizuální pomůcku, aby bylo místo dopadu a odrazu kuličky dobře patrné. Bližší vysvětlení je uvedeno v odstavci s popisem použitých spojů dynamické simulace.
Otevřete nový soubor sestavy a klepněte na tlačítko Vytvořit komponentu. Do pole Název nové komponenty zadejte Podložka a klepněte na OK. Ze stromu prohlížeče vyberte rovinu XY. Dle Obr. 1 vytvořte náčrt a vysuňte jej do vzdálenosti 5 mm. Klepněte na tlačítko Návrat.
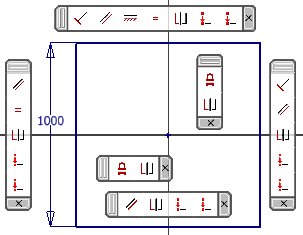
Obr. 1: Náčrt podložky
Klepněte na tlačítko Vytvořit komponentu. Pojmenujte ji jako Kulička. Zkontrolujte, že není zatržena volba Vytvořit vazbu roviny náčrtu na vybranou plochu nebo rovinu a klepněte na OK. Ze stromu prohlížeče vyberte rovinu XY. Nakreslete půlkruh o poloměru 50 mm a orotujte jej kolem osy. Kulička bude po vytvoření procházet podložkou – toto vyřešíme až v prostředí dynamické simulace.
Dle zadání má mít kulička hmotnost 2 kg. Je tedy potřeba vytvořit materiál s patřičnou hustotou. Klepněte na Formát – Editor stylů a norem. Rozbalte větev Materiál, klepněte na Výchozí a z horní části dialogového okna vyberte Nový. Pojmenujte jej jako Kulička a poklepáním nastavte tento materiál jako aktivní. Do pole Hustota zadejte hodnotu 3,8197 g/cm3. Klepněte na tlačítka Uložit a Hotovo. Ve vlastnostech souboru kuličky na záložce Fyzikální překontrolujte, že kulička váží 2 kg (Obr. 2). Klepněte na tlačítko Návrat.
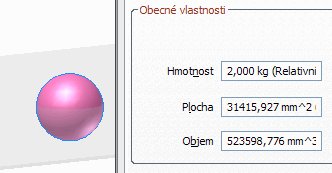
Obr. 2: Hmotnost kuličky
Povolení gravitace
Z nabídky Aplikace vyberte volbu Dynamická simulace. Pokud to bude nutné, zrušte dotaz na spuštění cvičení.
Protože budeme simulovat volný pád kuličky z klidové polohy bez působení jiného vnějšího zatížení, stačí povolit gravitaci. Ve stromu dynamické simulace ve větvi Vnější zatížení klepněte pravým tlačítkem myši na Gravitace a vyberte Definovat gravitaci. V dialogovém okně zrušte zatržení u volby Vypnout. Volbu směru gravitace ponechte nastavenou dle entity. Poté klepněte na svislou hranu podložky (Obr. 3) a podle potřeby obraťte směr šipky tak, aby gravitační zrychlení působilo proti ose Z. Klepněte na OK.
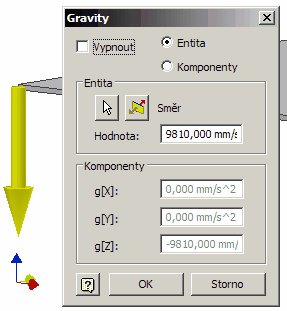
Obr. 3: Povolení gravitačního zrychlení
Vytvoření spojů dynamické simulace
V panelu nástrojů Dynamické simulace klepněte na Nastavení dynamické simulace. V dialogovém okně zrušte zatržení u volby Automaticky aktualizovat posunuté spoje. Okno uzavřete klepnutím na OK.
V panelu Dynamické simulace klepněte na Vložit spoj. Z rozbalovacího seznamu vyberte Prostorový. Jako Komponentu 1 vyberte Podložku. Nic dalšího u Komponenty 1 nevybírejte. Klepněte na jediné dostupné tlačítko v části Komponenta 2 a vyberte Kuličku. Osy souřadných systémů obou součástí budou orientovány stejným směrem (Obr. 4). Směry os je možné změnit pomocí tlačítek v dialogovém okně, popř. můžete po přepnutí stromu prohlížeče do Modelu vybrat některou z os součásti. Klepněte na OK.
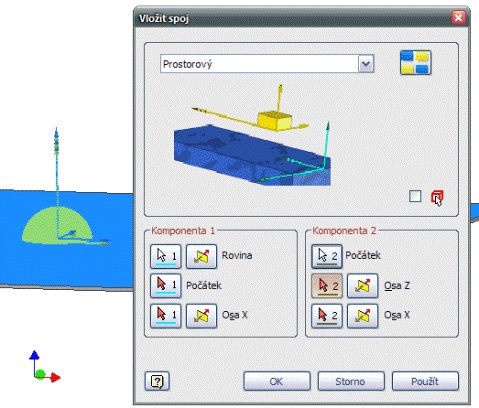
Obr. 4: Vytvoření prostorového spoje
Ve stromu dynamické simulace byl ve větvi Standardní spoje vytvořen Prostorový spoj.
Nastavení parametrů spoje
Klepněte na spoj n°1: Prostorový pravým tlačítkem myši a vyberte Vlastnosti. Přepněte se na kartu Stupeň volnosti 6 (T) – budeme editovat vlastnosti šestého stupně volnosti tělesa. V tomto případě se jedná translační pohyb v ose Z (viz Obr. 5).
Upravíme vzdálenost mezi kuličkou a podložkou. Počátek souřadného systému podložky leží na její horní ploše, počátek souřadného systému kuličky leží v jejím středu. Do pole Poloha zadejte hodnotu 200 mm a stiskněte Enter. Vzdálenost souřadných systémů těles ve směru osy Z bude odpovídat zadanému údaji.
V části okna Hranice zatrhněte volbu Min. Do pole Hodnota zapište 50 mm, do pole Tuhost 1000 N/mm a do pole Tlumení zadejte 100 N s/m. Klepněte na tlačítko OK.
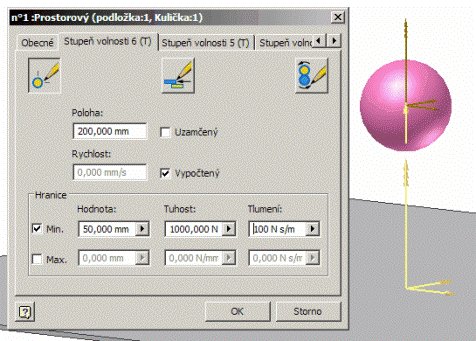
Obr. 5: Nastavení parametrů prostorového spoje
Prostorovému spoji jsme tedy nastavili následující chování: počáteční vzdálenost kuličky nad podložkou bude 200 mm. Jakmile nastane kontakt kuličky s povrchem podložky (střed kuličky se bude nacházet ve vzdálenosti 50 mm nad povrchem), projeví se součinitel tlumení kuličky a tuhost kuličky (oba parametry jsou po celou dobu kontaktu kuličky a podložky nastaveny na konstantní hodnotu). „Detekce“ kontaktu kuličky a podložky a následné použití součinitele tlumení a tuhosti je zajištěno pomocí definované hranice 50 mm (viz Obr. 5). V tomto případě tedy model podložky nepotřebujeme, slouží pouze k tomu, aby se kulička neodrážela od vzduchu. V případě, že by byl kontakt kuličky a podložky skutečně zjišťován pomocí spoje 3D dotyk, by se už nejednalo o odraz od dokonale tuhé podložky (dotykový spoj rovněž umožňuje nastavit hodnoty tuhosti, tlumení i tření) a výsledná vzdálenost odrazu by byla jiná.
Nastavení doby simulace a zobrazení výsledků
V Panelu simulace nastavte Konečný čas simulace na 3 s. Hodnota počtu uložených snímků (kroků simulace) se automaticky nastaví na 300.
V panelu Dynamická simulace klepněte na Okno grafů. Ve stromu spojů rozbalte n°1: Prostorový – Polohy a zatrhněte p[1.6]. V Panelu simulace klepněte na tlačítko Spustit nebo přehrát simulaci. Kulička se bude odrážet od desky (resp. se bude řídit nastavenou vzdáleností 50 mm) a v okně grafů se bude zároveň vykreslovat vzdálenost středu kuličky od podložky. Výsledek je na Obr. 6.
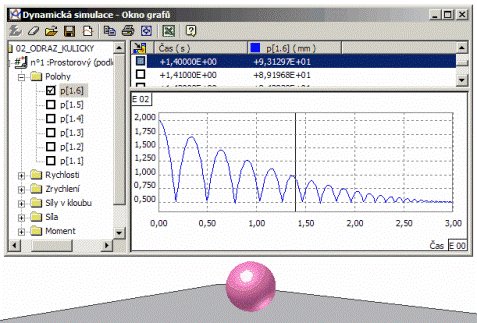
Obr. 6: Výsledek simulace
Pokud vás zajímají další vypočtené hodnoty (např. rychlost), můžete si je výběrem ze stromu zobrazit v okně grafů. Nenulové hodnoty budou pouze u parametrů označených [1.6].