Vytváříme kulové čepy
Ve svém volném čase se věnuji již dlouhá léta letecké modelařině. U zrodu tohoto článku stál jeden konstrukční problém, u kterého bylo nutné vytvořit sadu závěsů pro tzv. flybarless rotorovou hlavu ak…
Ve svém volném čase se věnuji již dlouhá léta letecké modelařině. U zrodu tohoto článku stál jeden konstrukční problém, u kterého bylo nutné vytvořit sadu závěsů pro tzv. flybarless rotorovou hlavu akrobatického vrtulníku. Jedná se o konstrukční koncepci, při které je model vrtulníku stabilizován ve všech osách nikoliv pomocí přídavných stabilizačních ploch, ale pomocí tříosého elektronického gyroskopu. Tato koncepce dovoluje výrazné zjednodušení konstrukce rotorové hlavy, je tužší a ideální pro maketové vrtulníky. Cenou za tuto změnu je nutnost využití speciálního tříosého gyroskopu, který nekompenzuje pouze reakční moment vznikající otáčením hlavního rotoru (vrtulník by se jinak roztočil a nešel řídit), ale také cyklické a kolektivní řízení. Pro ilustraci řešeného problému uvádím fotografii rotorové hlavy.
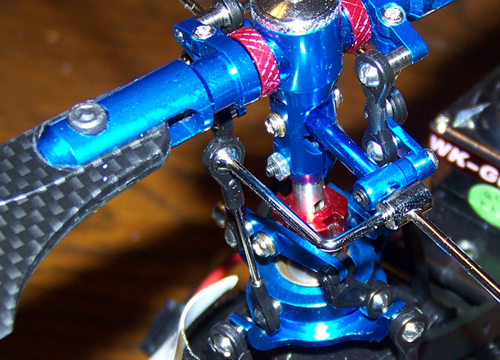
Koncepce původní rotorové hlavy s mechanickým stabilizátorem
Z pohledu na konstrukci rotorové hlavy je jasné, že se bude jednat o poměrně složitý kinematický problém s vysokými nároky na přesnost a kvalitu materiálů. Z obrázku je zřejmé, že hlava s vyrovnávacím rotorem je opravdu konstrukčním oříškem, u kterého je využití digitálního prototypu jedinou efektivní možností, jak tuto úlohu z hlediska pohybů popsat. Výhodou 3D řešení je navíc možnost detailních analýz pevnosti jednotlivých konstrukčních částí, které jsou vesměs vyrobeny ze slitin hliníku a kompozitů. Pro finální představu se jedná o sestavu, která se při průměru rotorových listů 1200 mm točí přibližně 1500 ot/minutu.
Kulové čepy a jejich vazby
Při řešení konstrukce sestavy bylo nutné řešit celou řadu otázek. Jedna ze základních vychází z vlastní koncepce návrhu vazeb táhel zakončených kulovými čepy. Konstrukce kulových čepů v takto jemné mechanice je nepatně odlišná od běžných „dospělých“ řešení. Ve většině případů se jedná o mosaznou kulovou hlavu, kterou obepíná táhlo z houževnatého plastu syceného skelnými vlákny.
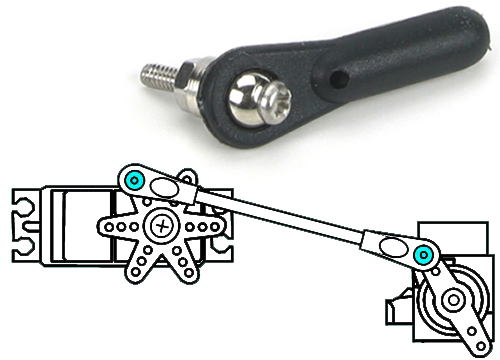
Koncepce kulového čepu využívaného pro řízení servy
Společnou charakteristikou pro všechny typy kulových čepů je ovšem jejich kinematická koncepce. Umožňují v mechanismu prakticky pouze minimálně omezený pohyb táhel do všech stran. Což zabraňuje jejich zbytečnému namáhání na ohyb a zvyšuje přesnost pohybu celého mechanismu. Obdobou je nasazení kulových čepů pro řízení přední nápravy automobilu.
Konstrukce podsestavy kulového čepu
Pokud vytváříme kulový čep, musíme prakticky vždy použít přímého modelování sestavy. Kulové čepy nejsou běžně dostupným produktem databází normalizovaných dílů. Je tedy nutné vždy jejich provedení zvážit s výhledem na jejich snadnou modifikaci, případně využití v jiných projektech. Každý kulový čep proto doporučuji realizovat jako samostatnou podsestavu s průhledně definovanými parametry a modifikátory. Usnadníte tak práci nejen sobě, ale také dalším uživatelům v tvůrčím týmu.
Pro ilustraci uvádím základní postup vytvoření kulového čepu a jeho složení do podsestavy. Použita je právě koncepce čepu z výše uvedeného řízení rotorové hlavy pro akrobatický vrtulník.
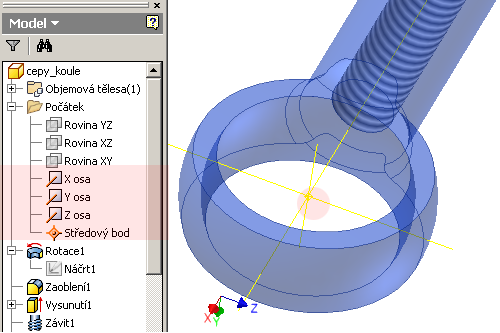
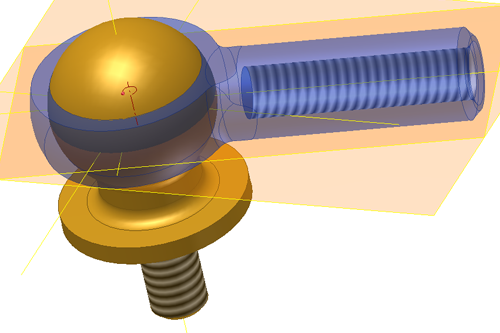
Princip umístění středu kulové plochy táhla do globálního souřadného systému
Základní podsestava kulového čepu má dvě základní součásti, které je vhodné již při jejich tvorbě umístit zcela zásadně do globálního souřadného systému Autodesk Inventoru. Na toto pravidlo se často zapomíná i u jiných typů součástí. Globální roviny jsou často jedinou možností jak efektivně geometrii dílu do sestavy umístit. Proč využívat zbytečného množství pracovních rovin a znepřehledňovat tak konstrukční návrh, když můžeme použít roviny globální. Jsou vždy k dispozici a navíc, pokud v nich efektivně ukotvíme prvotní tvořící náčrt součásti, mohou mít i zcela přesnou pozici. Tohoto pravidla je využito také v řešení dvou základních dílů podsestavy kulového čepu.
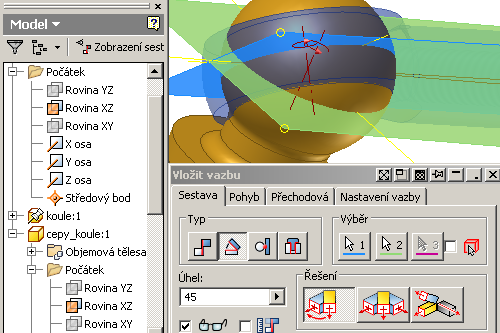
Sférické řízení vzájemné polohy čepu a táhla pomocí globálních rovin
Veškerá geometrie čepu a táhla je odvozena s referenční pozicí kulových částí čepu ve středu pomyslné kulové plochy. To má za důsledek v sestavě to, že lze zcela volně řídit vzájemnou pozici táhla a čepu pomocí sférických souřadnic definovaných pomocí tří vzájemných úhlů globálních rovin xy, xz a yz. Vlastní vazba čepu a koncovky táhla se skládá z vazby bod a bod a výše uvedených třech úhlů. Úhly je nutné ovšem použít pouze v případě, že musíme některý z úhlů přímo řídit, případně jej omezit v určitém rozsahu.
Finální sestava s jedním stupněm volnosti
Související články:
- Vytváříme kulové čepy