Průmyslová robotika-Animace v Inventoru I
Základní hlediska rozdělní robotů při výběru pro nasazení do dané aplikace: Oblast použití Pracovní prostor Pracovní zátěž Montážní poloha Relativní opakovatelnost V dnešní době průmys…
Základní hlediska rozdělní robotů při výběru pro nasazení do dané aplikace:
- Oblast použití
- Pracovní prostor
- Pracovní zátěž
- Montážní poloha
- Relativní opakovatelnost
V dnešní době průmyslové roboty pokrývají široké spektrum požadavků na automatické řešení nejrůznějších aplikací, kde je kladen důraz na produktivitu a automatizovatelnost procesu, které dokážou zastat téměř celý cyklus počínaje výrobou, montáží až po konečnou kontrolu, vždy záleží jakým koncovým členem je robot pro danou aplikaci vybaven.
Nejčastěji se můžeme setkat s roboty určených na:
- Svařování
- Lakování
- Montáž
- Manipulace
- Řezání
- Dávkování
- … a mnohé další
-které lze především nalézt v automobilovém průmyslu, výrobě a manipulaci.
1) Oblast použití
-je dána především kinematikou robotu potřebnou pro řešení dané aplikace.
 [1]")
 [2]")
Obr. 1 SCARA robot-Kuka [1] Obr. 2 SDA10D-Motoman [2]


Obr. 3 ABB svařovací roboty [3] Obr. 4 Stäubli-řezaní vodním paprskem [4]
2) Pracovní prostor
-je oblast, kterou může robot obsluhovat
-důraz je kladen na pokrytí největšího pracovního prostoru při nejmenší zástavbě prostoru samotným robotem
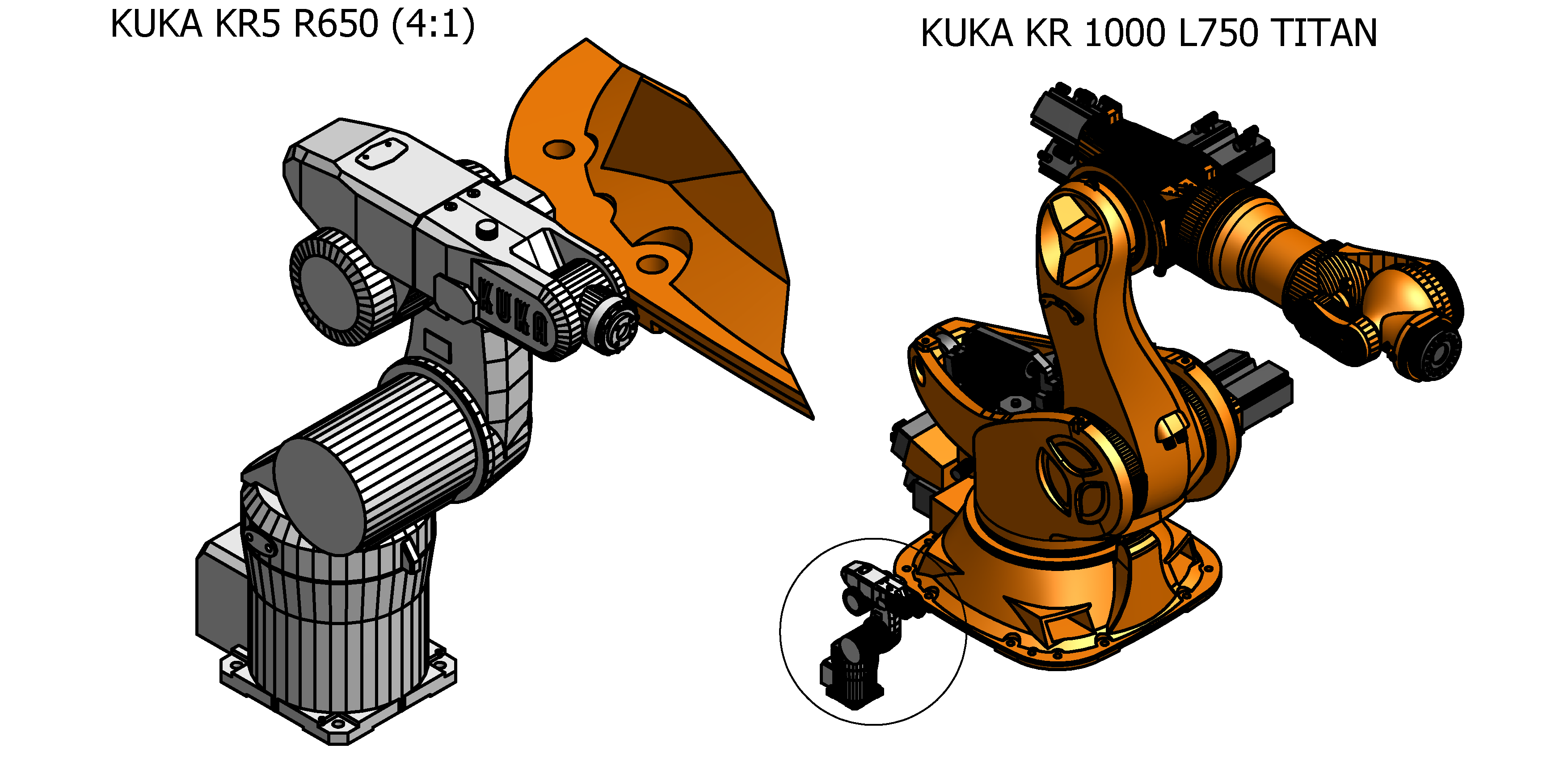
3) Pracovní zátěž (nosnost)
-k dispozici máme na výběr z průmyslově dodávaných robotů od nosnosti několika málo kg pro drobnou manipulaci až po stroje s nosností až do jedné tuny
-roboty se pak liší zejména velikostí své zástavby, která se navenek projevuje navýšením mohutnosti a tuhosti
4) Montážní poloha
-vedle "obvyklých" montážních poloh robotů jako je umístnění na podlaze (Obr. 1, 3 a 5), nebo pracovních stolech máme možnost robot uchytit např. na stěnu, nebo strop místnosti (Obr. 4).
Řízení modelu (CAR, CAD)
CAR (Computer Aided Robotic, Počítačově podporovaná robotika)
-jedná se o specializované SW pro virtuální navrhování pracovních linek a offline programovaní robotů. Tyto programy z pravidla poskytují výrobci robotů pro své produkty.
Ukázka pracovní linky vytvořena v ABB Robot Studio a porovnáni se skutečným výrobním procesem.
CAD (Computer Aided Design, Počítačově podporované konstruování, navrhování)
Pro naši potřebu animace, si ukážeme základní ovládací prvky v Inventoru na čtyrosém robotu typu SCARA (Compliant Articulated Robot Arm) (Obr. 1), kde bude robot na pomyslné kontrolní lince (Obr. 7 a 8) překládat výrobky mezi vstupem, optickým měřením a výstupem rozděleným na zmetkové a dobré výrobky.
Dosah ramene robotu, který můžeme využít (nebo také pracovní obálka) lze graficky znázornit a většinou je takový grafický podklad součástí každého robotu (Obr. 6).
 ¨
¨