Jak na jeřábový dvojitý hák v Inventoru? 2. část
V závěru první části článku jsem vytvořil obě ramena dvojitého háku. Abych mohl později měnit velikost celého háku, potřeboval jsem vytvořit pracovní rovinu závislou na parametru L, nebo L1 (Obrázek&n…
V závěru první části článku jsem vytvořil obě ramena dvojitého háku. Abych mohl později měnit velikost celého háku, potřeboval jsem vytvořit pracovní rovinu závislou na parametru L, nebo L1 (Obrázek 13).
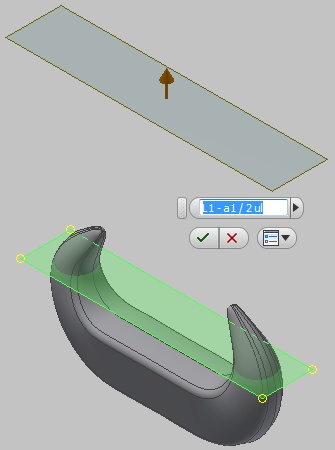
Obrázek 13 – Pracovní rovina definující délku válcové části háku
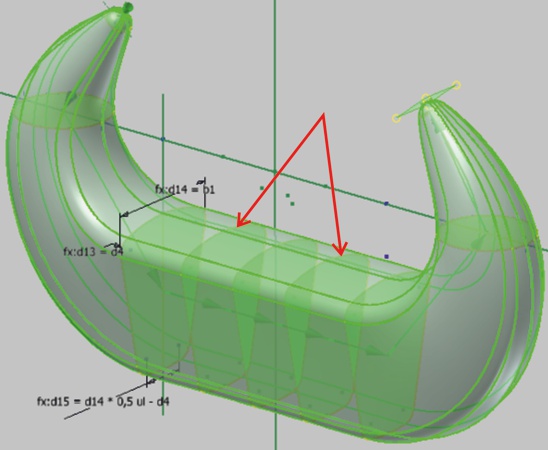
Z náčrtu v této rovině jsem pak chtěl vysunout k již hotovému tělesu dvojitého ramene háku jeho válcovou část (Obrázek 14).
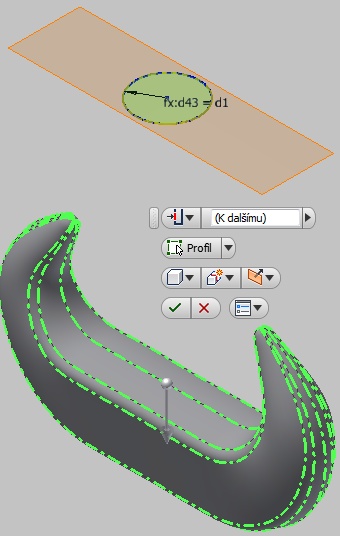
Obrázek 14 – Snaha o vysunutí válce k již vytvořené části háku
Bohužel pokus skončil výstražným hlášením upozorňujícím na nemožnost vytvoření tohoto prvku (Obrázek 15).
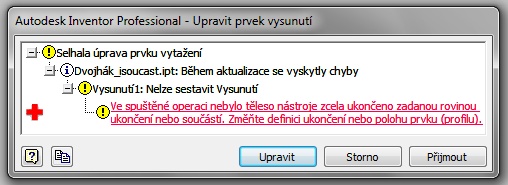
Obrázek 15 – Varovné hlášení
Po prohlídce nárysu bylo zřejmé, že pouhé tři stejné průřezy k definici ramen háku nestačí (Obrázek 16).
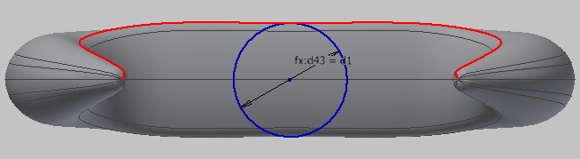
Obrázek 16 – Zjevně zvlněná linie boční křivky ramen háku
Vložení dvou dalších dvou shodných průřezů do prvku vytvořeného šablonováním tvar ramen zpřesnilo. (Obrázek 17).
Obrázek 17 – Původní šablonování doplněné o dva stejné průřezy
Boční linie se nyní srovnala a vysunutí válcové části již nic nebránilo (Obrázek 18).
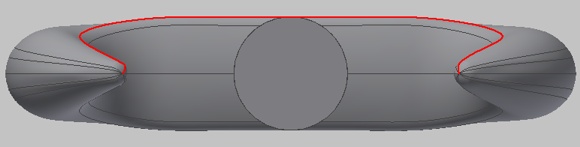
Obrázek 18 –Srovnaná boční linie s již vysunutou válcovou částí háku
Vzhledem k tomu, že konečným výsledkem nemá být jen dvojitý hák, ale i jeho iSoučást s proměnnou velikostí závislou na tabulkových hodnotách, přejmenoval jsem si jednotlivé parametry (Obrázek 19).
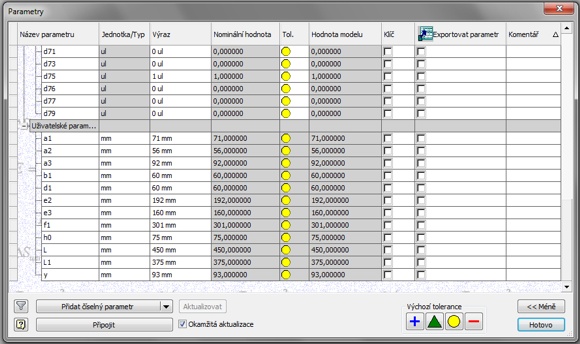
Obrázek 19 – Upravená tabulka parametrů
Posledním modelovacím krokem mělo být zaoblení s poloměrem a1/2 mezi válcovou částí a rameny háku. To se však zřejmě z důvodu tečného přechodu dvou válcových ploch nezdařilo (Obrázek 20).
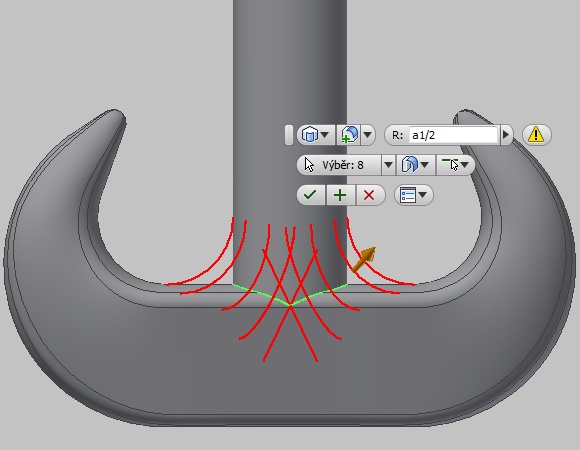
Obrázek 20 – Neúspěšný pokus o přechod mezi válcovou části a rameny háku
Uvědomil jsem si, že pracuji s výkovkem a zkusil jsem systém ošálit zmenšením rádiusu o jeho zanedbatelnou poměrnou část. Pokus vyšel (Obrázek 21).
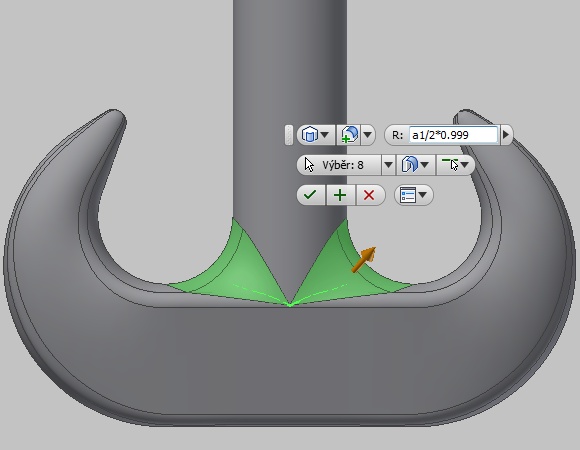
Obrázek 21 – Kladná reakce na mírné zmenšení rádiusu
Pro vyzkoušení funkčnosti iSoučásti jsem si známým postupem připravil tabulku s hodnotami pro minimální, střední a maximální velikost háku (Obrázek 22).
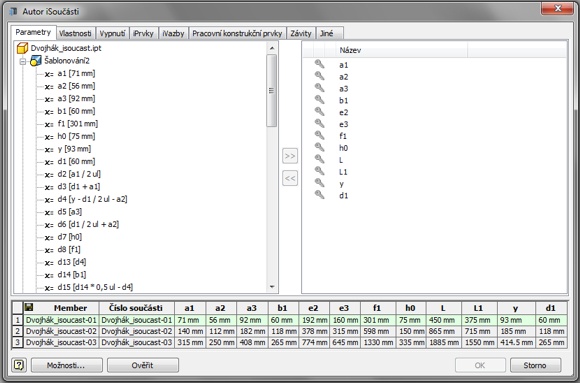
Obrázek 22 – Tabulka hodnot iSoučásti
Změna velikostí iSoučásti dvojitého jeřábového háku probíhala bez problémů (Obrázek 23).
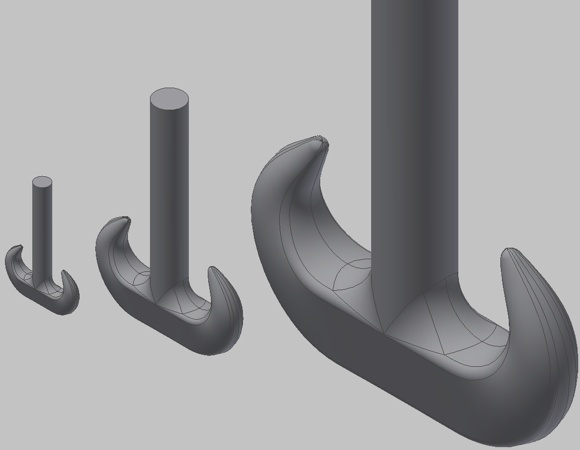
Obrázek 23 – Vložení tří různých velikostí háku
Na závěr bych chtěl zmínit, že jsem dvojitý hák modeloval v Inventoru 2013, ale vzhledem k tomu, že čtenář, kterého jsem zmiňoval v úvodu první části článku, pracoval s Inventorem 2010, zkusil jsem postup zopakovat i v něm. Zde bylo nutno rádius mezi válcovou částí a rameny háku vytvořit ne jako jeden prvek, ale jako prvky dva. Nejdříve na jedné straně ramene a pak na druhé.