Pracujeme s plochami v Autodesk Inventoru 2014, část 6.
Práce s plochami v Autodesk Inventoru velmi často stojí na tvarech, které jsou tvořeny řadou segmentů triviálnějších ploch. Postup musí být ovšem vystavěn na precizní definici hraničních křivek, které…
Práce s plochami v Autodesk Inventoru velmi často stojí na tvarech, které jsou tvořeny řadou segmentů triviálnějších ploch. Postup musí být ovšem vystavěn na precizní definici hraničních křivek, které jsou využívány pro jednotlivé postupy a nástroje. V případě ploch se navíc často jedná o obecné spline křivky, jejichž kontrola a řízení je složitější, než je tomu u základních kuželoseček využívaných u solid modelů.
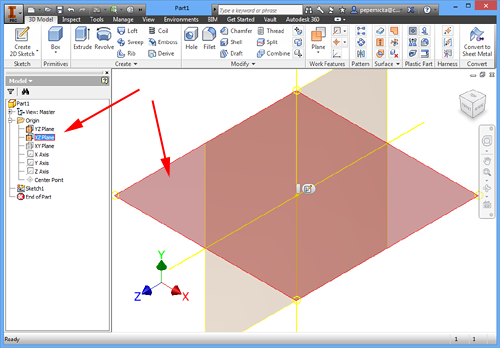
Příprava pracovních rovin
Dnešní článek věnujeme postupu, který vychází z postupné definice přesných ploch se zajištěnou vzájemně závislou geometrií podél jednotlivých hraničních křivek. Tento postup využijeme v případě, že potřebujeme aplikovat v konstrukci přesně řízené plochy.
V případě ploch je velmi vhodné hledat symetrie
Před konstrukcí plochy je vždy vhodné analyzovat její symetrii. Tato běžná funkce může výrazně urychlit a zefektivnit tvorbu nové geometrie. Typickou oblastí je například návrh karoserie automobilu, kdy je v její konstrukci a designu zcela zásadní požadavek. Zrcadlí se nejen části karoserie, ale také části technologií výrobní linky apod.
První profily v symetrické rovině
V našem příkladu vytvoříme pouze polovinu plošné geometrie, která bude symetrická vůči průchozí globální rovině odvozené z hlavního souřadného systému. Pro tvorbu ploch využijeme postupu postupného plátování. Segmenty ploch vytvoříme pomocí zřejmě nejobecnějšího příkazu pro šablonování. Není žádným tajemstvím, že tímto příkazem nahradíme například rotaci, vysunutí apod. Proto má šablonování v oblasti tvorby přesných ploch poměrně dominantní pozici.
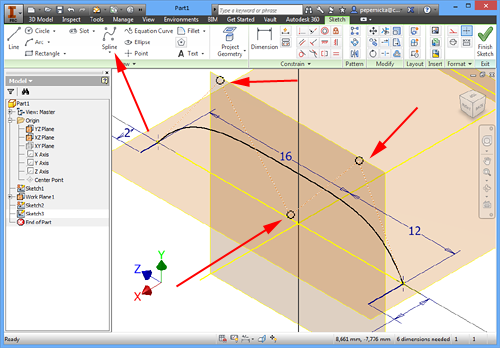
Spline profil s řídícími body
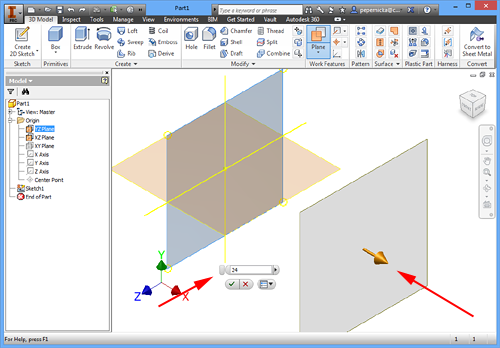
Pro šablonování je stěžejní správná příprava pracovních rovin. My využijeme jedné roviny horizontální a dvou rovin vertikálních. Tyto budou odvozeny od globální roviny. Ve vertikální a horizontální rovině vytvoříme pomocí dvou přímek profily a pomocí spline křivky první trajektorii.
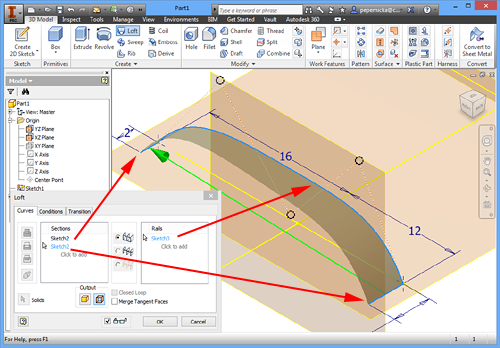
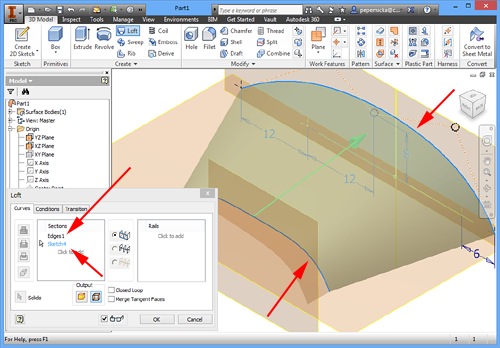
Šablonování prvního segmentu plochy
Zcela nezbytnou pomůckou pro zajištění provázaných a společných bodů profilů a trajektorie je projekce geometrie. Tento příkaz zaručí efektivní vytváření společných bodů v různoběžných rovinách a jejich vzájemnou provázanost. Na výše uvedeném obrázku je patrné, jak vzniká částečně parametrická NURBS plocha. Pro plnou parametrizaci by bylo nutné zadat navíc pozice řídicích bodů.
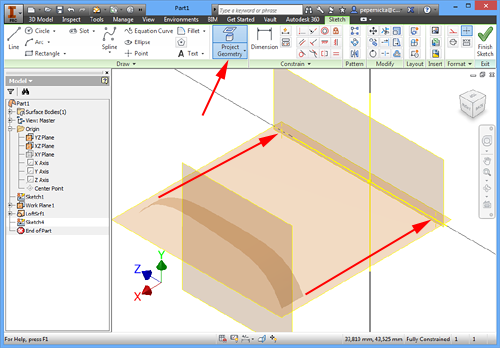
Projekce bodů do roviny symetrie pro definici další křivky
Typickým problémem při tvorbě plátovaných ploch je vzájemná definice provázané geometrie. Tato operace zaručuje nejen přesnost související plochy, ale také možnost řízení jejího vzájemného tvaru a pozice. Jinak je tvarování plochy pouze velmi obtížné a nepřesné.
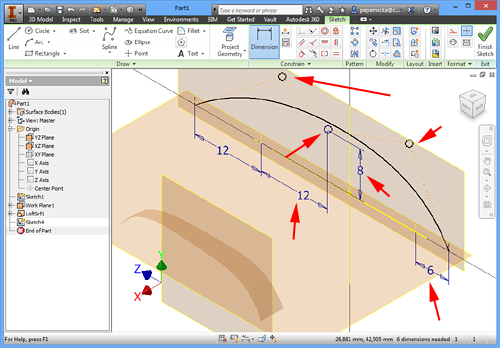
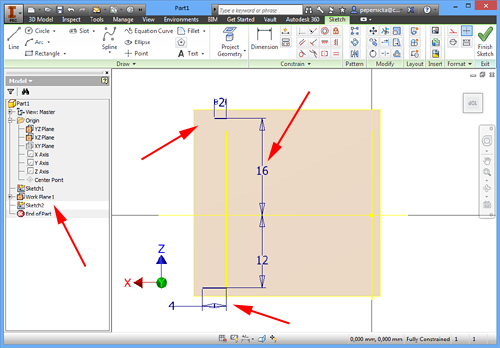
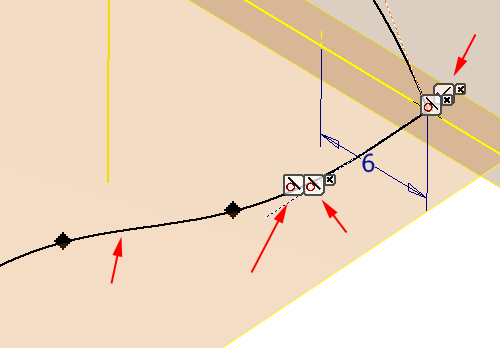
Parametrické umístění další tvořící spline křivky
V případě druhé plochy využijeme výše popsaného postupu a určíme přesnou pozici koncových bodů spline křivky pomocí rozměrových parametrů, případně geometrických vazeb. Lze přidat také další kóty, které použijeme pro přesnější řízení geometrie hraniční spline křivky. Kóty jsou přiřazeny na úrovni řídících bodů křivky.
Šablonovaná plocha bez trajektorií
Šablonování je univerzálním nástrojem pro vytváření ploch. Příkaz můžeme využít v celé řadě modelových případů od jednoduchého prolnutí několika profilů, až po definice složité geometrie vázané na parametricky řízené trajektorie.
Definice první trajektorie a její zpřesnění pomocí geometrických vazeb
Pro definici trajektorií plochy je vhodné vždy zvážit kolik, a jak komplikovaných křivek potřebujeme. Obecně platí, že pro estetickou plochu použijeme minimum řídících a uzlových bodů křivek. Jsou pak plynulejší a vyhlazenější. Další body využíváme především v místech zlomů a výrazných změn křivosti.
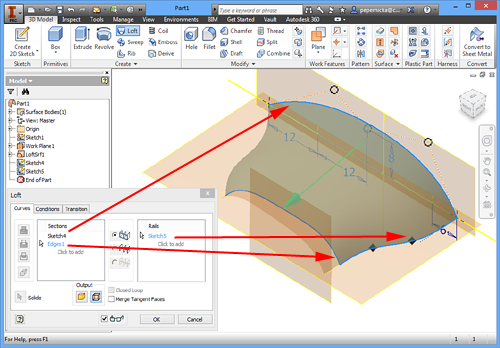
Šablonovaná plocha s jednou trajektorií
Autodesk Inventor dodržuje tvar profilu a trajektorie při vytváření nové plochy se zachováním vstupních tvarů v průběhu celé plochy, není-li určeno jinak. To je patrné z výše uvedeného obrázku, kdy je geometrie plochy v zadním segmentu definována geometrií spline křivky, v předním.
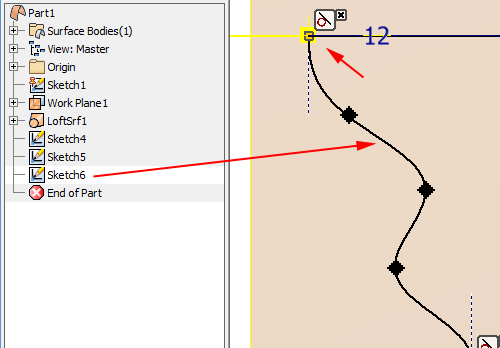
Geometrie druhé trajektorie
Při tvorbě trajektorií plochy v rovině kolmé na profily opět využíváme v maximální míře projekce geometrie a pomocných konstrukcí. Tento postup jsme si již v našem seriálu popsali. Připomeňme pouze, že pomocná konstrukce, například kolmice v místě ukončení křivky, umožňuje definovat tečnost křivky a provázanost jednotlivých segmentů ploch.
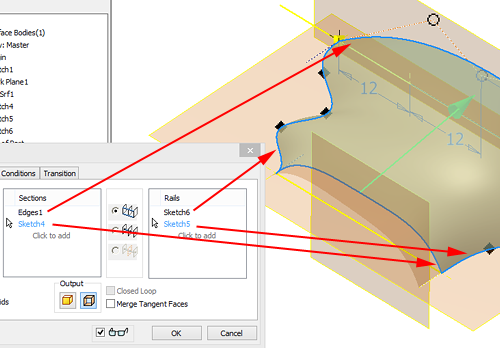
Šablonovaná plocha vytvořená pomocí dvou trajektorií